EgoNature Dataset
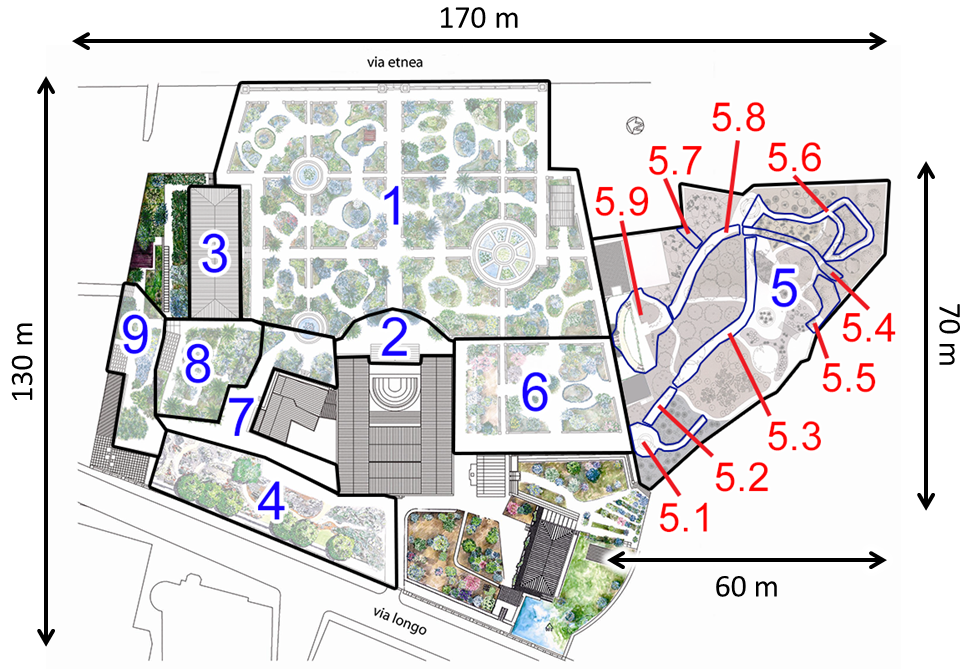
The dataset used in this work has been collected asking 12 volunteers to visit the Botanical Garden of the University of Catania. The garden has a length of about 170m and a width of about 130m. In accordance with experts, we defined 9 contexts and 9 Subcontexts of interest which are relevant to collect behavioral information from the visitors of the site. We asked each volunteer to explore the natural site wearing a camera and a smartphone during their visit. The wearable camera has been used to collect egocentric videos of the visits, while the smartphone has been used to collect GPS locations. GPS data has been later synced with the collected video frames.
We collected and labeled almost 6 hours of recording, from which we sampled a total of 63,581 frames for our experiments. The selected frames have been resized to 128x128 pixels to decrease the computational load.
For more details about our dataset go to this page  .
.
 .
. Methods
We consider localizing the visitor of the natural site as a classification problem. In particular, we
investigate classification approaches based on GPS and images, as well as methods jointly exploiting both
modalities. Each of the considered methods is trained and evaluated on the proposed EgoNature dataset
according to the three defined levels of localization granularity: 9 Context, 9 Subcontext,
and 17 Subcontext.
Localization Methods Based on GPS: when GPS coordinates are available, localization can be performed
directly by analyzing such data. We employed different popular classifiers: Decision Classification Trees
(DCT), Support Vector Machines (SVM) with linear and RGB kernels and k-nearest neighbor (KNN). Each of the
considered approaches takes the raw GPS coordinates as input and produces a probability distribution over
the considered classes as output. We tune the hyperparameters of the classifiers performing a grid search
with cross validation. We remove duplicate GPS measurements from the training set when train GPS-based
methods, as we noted that this improved performance. Please note that, for fair comparison, duplicate
measurements are not removed at test time.
Localization Methods Based on Images: we consider three different CNN architectures: AlexNet,
Squeezenet and VGG16. The three architectures achieve different performances on the ImageNet classification
task and require different computational budgets. In particular, AlexNet and VGG16 require the use of a GPU
at inference time, whereas SqueezeNet is extremely lightweight and has been designed to run on CPU (i.e.,
can be exploited on mobile and wearable devices). We initialize each network with ImageNet-pretrained
weights and fine-tune each architecture for the considered classification tasks.
Localization Methods Exploiting Joinlty Images and GPS: images and GPS are deemed to carry
complementary information. Specifically, even inaccurate GPS measurements can be useful as a rough location
prior, while images can be used to distinguish neighboring areas characterized by different visual
appearance and geometry. We investigate how the complementary nature of these two signals can be leveraged
using late fusion during classification. Late fusion can be seen as a kind of weighted average between the
vectors of class scores produced by image- and GPS-based methods.
Paper
F. L. M. Milotta, A. Furnari, S. Battiato, G. Signorello, G. M. Farinella. Egocentric visitors localization in natural sites. Journal of Visual Communication and Image Representation, 2019. Download the paper here.
Patent
G. M. Farinella, G. Signorello, A. Furnari, S. Battiato, E. Scuderi, A. Lopes, L. Santo, M. Samarotto, G. P. A. Distefano, D. G. Marano, “Integrated Method With Wearable Kit For Behavioural Analysis And Augmented Vision" (Italian Version: "Metodo Integrato con Kit Indossabile per Analisi Comportamentale e Visione Aumentata"), Patent Application number 102018000009545, filling date: 17/10/2018, Università degli Studi di Catania, Xenia Gestione Documentale S.R.L., IMC Service S.R.L.
Acknowledgement
This research is supported by PON MISE – Horizon 2020, Project VEDI - Vision Exploitation for Data Interpretation, Prog. n. F/050457/02/X32 - CUP: B68I17000800008 - COR: 128032, and Piano della Ricerca 2016-2018 linea di Intervento 2 of DMI of the University of Catania.Related Work
This work is related to the following publication:
- F. Ragusa, A. Furnari, S. Battiato, G. Signorello, G. M. Farinella. Egocentric Point of Interest
Recognition in Cultural Sites. Submitted In International Conference on Computer Vision Theory and
Applications, 2019.
 Web Page.
Web Page.
- F. Ragusa, A. Furnari, S. Battiato, G. Signorello, G. M. Farinella. Egocentric Visitors Localization
in Cultural Sites. In Journal on Computing and Cultural Heritage (JOCCH), 2019. Web Page.
- F. Ragusa, L. Guarnera, A. Furnari, S. Battiato, G. Signorello, G. M. Farinella. Localization of
Visitors for Cultural Sites Management. In International Conference on Signal Processing and Multimedia
Applications (SIGMAP), Porto, Portugal, July 26-28, 2018. Web Page.
- A. Furnari, S. Battiato, G. M. Farinella, Personal-Location-Based Temporal Segmentation of Egocentric
Video for Lifelogging Applications, submitted to Journal of Visual Communication and Image Representation
Web Page.
- A. Furnari, G. M. Farinella, S. Battiato. 2017. Recognizing Personal Locations From Egocentric Videos.
IEEE Transactions on Human-Machine Systems (2017). https://doi.org/10.1109/THMS.2016.2612002
Web Page.
- A. Furnari, G. M. Farinella, S. Battiato, Temporal Segmentation of Egocentric Videos to Highlight Personal Contexts of Interest, International workshop on egocentric perception, interaction and computing (EPIC) in conjunction with ECCV 2016.
People